Dark T-Shirt Transfer Paper,T Shirt Transfer Paper,Sublimation Transfer Paper,Black Shirt Light Transfer Paper GREEN-LIFE PAPER LTD , https://www.sjgreenlifepaper.com
In addition, with the advancement of integrated circuit manufacturing technology and the development of power electronics technology, AC servo has also achieved considerable development. Intelligent power module integrating three-phase inverter and protection circuit, isolation circuit, energy consumption braking circuit and other functions, appearance of advanced power electronic devices, more convenient AC servo control, lower power consumption, and more switching time Shorter, wider frequency range, superior performance. All of these make AC servos have obvious advantages over DC servos.
1. System Overview The hardware of AC servo digital system is DSP as a signal processor. It uses a rotary encoder and a current sensor to provide feedback signals. The intelligent power module IPM is used as an inverter. After the signal from the sensor is processed through filtering and shaping, it is fed back to The DSP performs operations. The DSP processes the reference signal and the feedback signal to adjust the current loop, speed loop, and position loop of the servo system. Finally, the output PWM signal drives the servo closed-loop control of the motor through the isolated drive IPM module. The hardware structure of the system is shown in Figure 1. 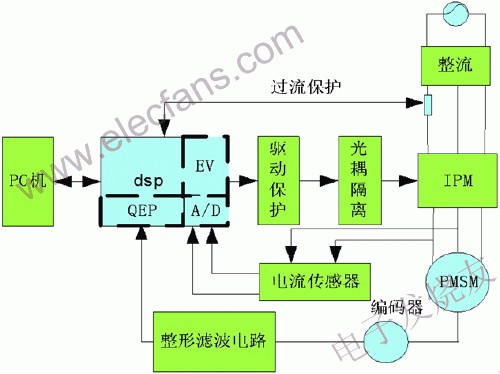
The system control is a three-loop control method. The position control is an outer ring and is also the final target. The speed control is the middle ring, and the current control is the inner ring. In order to ensure that the dynamic response speed and positioning do not produce oscillations, the current loop and the speed loop all use PID regulation, and the position regulator uses PI regulation. The control block diagram of the system is shown in Figure 2: 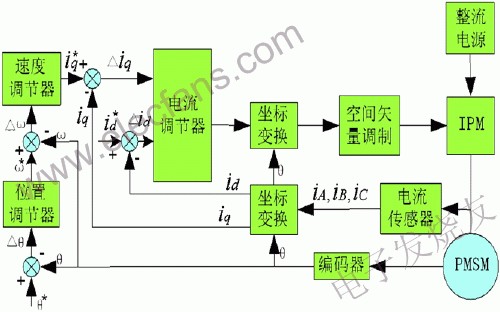
The actual position of the rotor position detected by the encoder is compared with the signal of the given position of the system. The difference after comparison is adjusted by the position regulator PI to output the rotor rotation speed given signal. The given rotation speed signal is then subjected to the actual speed signal detected by the encoder. After comparison, the difference after comparison is adjusted by the speed regulator, and the output current command value is given, and the PWM control is performed after the current feedback actual value is compared.
2. Vector control In the synchronous motor, the space angle between the excitation magnetic field and the armature magnetomotive force is not fixed, so adjusting the armature current cannot directly control the electromagnetic torque. Through the external control system of the motor, the armature magnetomotive force is spatially controlled with respect to the excitation magnetic field, the angle between the two is controlled to maintain a fixed value, and the amplitude of the armature current is also controlled. This control method is called For vector control.
The vector control is equivalent to controlling the three-phase current of the armature by controlling the current of the dq axis of the two-phase rotor reference coordinate. This equivalence can be clearly understood from the previous system control block diagram and can be expressed by the following formula:  (1)
(1)
An encoder mounted on the non-loading shaft end of the motor detects the position of the rotor pole at any time, continuously obtains the position angle information, and knows θ in real time through detection, that is, it can perform real-time coordinate changes, and the converted current is applied to the inverter. Control, generate PWM waveforms to control the motor.
3. Detection of position and speed The AC servo motor is equipped with an encoder to measure the position and speed. In most cases, the waveform of the signal directly from the encoder is irregular and cannot be directly used for control, signal processing and long-distance transmission. Therefore, it is necessary to shape and filter the signal into a rectangular wave and feed it back to the DSP. After processing, the two mutually orthogonal encoder signals A and B are directly transmitted to the QEP pin of the DSP through the voltage conversion. The unit generates a turn signal and a quadratic frequency pulse signal. The steering signal is determined based on the phase advance delay of the two signals. Since there is a problem of positive inversion and the counter is required to be reversible, the general-purpose timer 2 is set to the direction up-down count mode, and the frequency-doubled quadrature coded pulse is counted as the input clock of the timer 2 to count the direction. Determined by the turn signal, if the input phase of QEP1 advances, then it counts up, otherwise it counts down. The position and speed can be determined by the number of pulses and the pulse frequency. The total number of pulses per revolution is denoted by M. The number of pulses at time T1 is m1, and the angle at which the motor rotates can be calculated according to the following equation. ![]() (2)
(2)
If it is a case of multiple revolutions, the number of revolutions of the motor shaft can be known by matching the count value of the Z-phase zero pulse of the encoder and the clearing of the corresponding timer 2 . The calculation of the rotor speed of the motor can be based on the MT speed measurement method. The formula for determining the speed of the encoder is as follows: ![]() (3)
(3)
M1 - number of encoder pulses recorded by the counter within a fixed time;
M2—the number of DSP clocks recorded within a fixed time;
N—number of encoder lines, that is, the number of encoder pulses before frequency multiplication;
Fclk—The clock frequency of the DSP.
4. Conclusion In summary, the digital AC servo driver studied in this paper implements a modular design with a simple hardware structure and easy software programming. Can easily achieve PC or PLC and controller communication, so that the host computer can accept the real-time control system parameters and parameters to the servo control system, direct control of the servo system.
Analysis of Digital AC Servo Control Technology of Permanent Magnet Synchronous Motor
With the continuous development of the requirements of modern industry for precision, high speed, and high performance, traditional controllers are no longer competent in demanding applications. In many applications where high real-time performance and high efficiency are required, specialized controllers must be used. The digital signal processor (DSP) replaces part of the functions of the traditional controller. Especially when the control algorithm is complex or the algorithm is improved and optimized, the unique ability of DSP to quickly calculate is evident.
Figure 1 hardware structure
Figure 2 control system block diagram